
DESIGNED,
DEVELOPED AND
MADE IN GERMANY
SIROB ist die österreichische
Ländervertretung von Autonox Robotics
AUTONOX Robotermechaniken
Autonox Robotermechaniken sind steuerungsunabhängig. Das heißt, Sie können mit jeder geeigneten Antriebs-/Steuerungskombination angetrieben werden. Die Mechaniken werden mit den passenden Adaptern für die gewünschten Servomotoren ausgeliefert. Sie können zwischen Hygienic Design- und Standard-Robotern wählen.
Wir bieten Ihnen eine maximale Auswahl an Roboterstrukturen, Freiheitsgraden, Traglasten, Arbeitsbereichen und Optionen. Die Entwicklung, Konstruktion und Fertigung erfolgt ganzheitlich im Unternehmen von Autonox Robotics.
Diese Tatsache sichert unseren Anspruch auf höchste Produktqualität
„Made in Germany“.

AUTONOX & SIROB – Ihre starken Partner
Wettbewerbsvorteile
PARALLELE KINEMATIKEN
AUTONOX ROBOTORMECHANIKEN
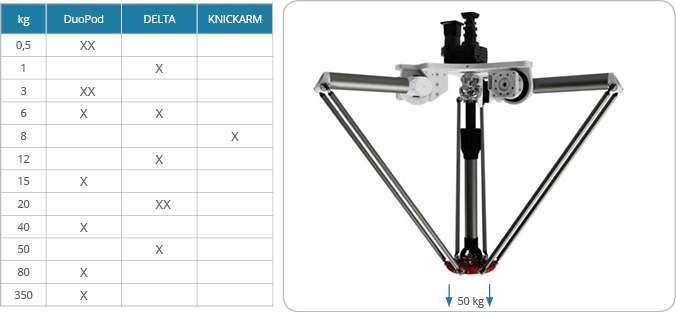
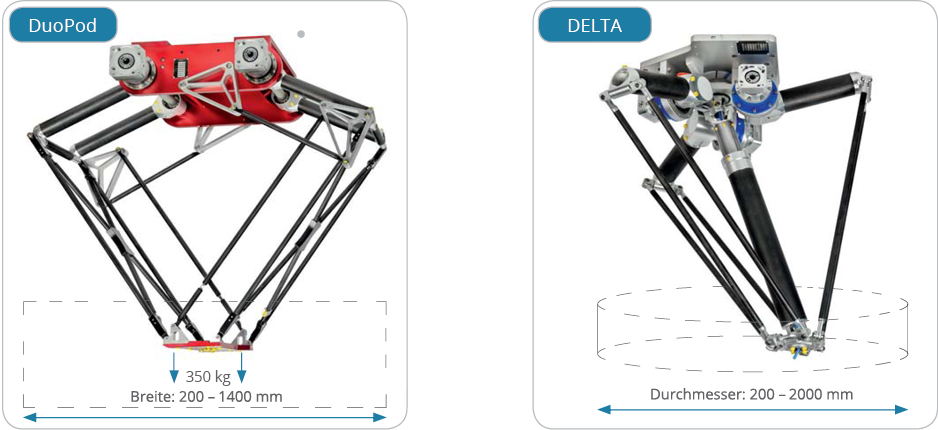
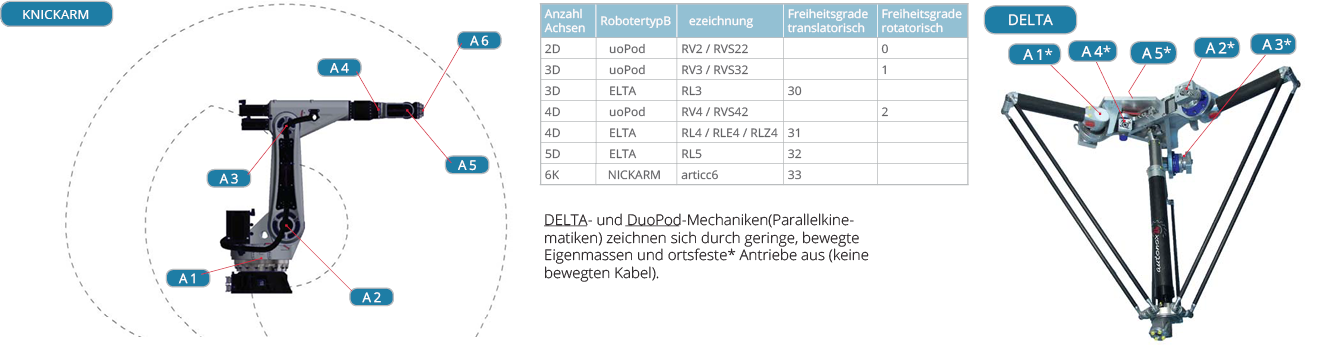
DELTA
- Mit der Möglichkeit einer engen Anordnung der Roboter aufgrund asymmetrischer Positionierung der Motoren und spezieller Getriebe-Anordnung.
- Hohe Kippsteifigkeit des Werkzeugträgers
- Hohe Leistung
- Gleichbleibender Abstand zwischen Robotern
- Mehrfache Überlappung der Arbeitsbereiche


AUTONOX ROBOTORMECHANIKEN
DUOPOD
- Schlanke Bauweise
(nur ein Oberarm pro Antrieb) - Hohe Leistung
- Vielfältige Einsatzmöglichkeiten
- Anzahl Freiheitsgrade (Achsen): 8/4
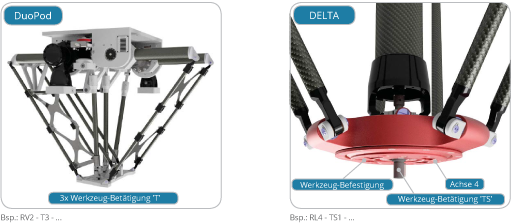
- Viele Opionen (z.B. T-Welle(n))


SERIELLE KINEMATIKEN
AUTONOX ROBOTORMECHANIKEN
KNICKARM
- Erhältlich mit 3 bis 6 Achsen
- 11 Varianten geplant – davon bereits 5 lieferbar!
- Traglasten von 3 kg bis 60 kg
- 11 Varianten sind derzeit geplant
- Verschiedene Arbeitsbereiche und Optionen
- KNICKARM-Robotermechaniken für jede Steuerung

DIE ARTIC BAUREIHE
COMING SOON
Funktionen
Nenntraglasten
Arbeitsbereich
Achsen
Medienversorgung

Integriertes Werkzeugwechselsystem (ATS)
- einfaches Wechseln von Werkzeugen
und Greifern. - Bis zu 10facher Medienübertragung im Werkzeugwech- selsystem (Pneumatik / Vakuum / Elektrik)
- Zur Nachbearbeitung vorbereiteter Wechseladapter (*)

Werkzeugflansch ‚T‘ / Werkzeugwelle ‚TS‘
Integriertes Werkzeugwechselsystem (ATS)
- einfaches Wechseln von Werkzeugen
und Greifern. - Bis zu 10facher Medienübertragung im Werkzeugwech- selsystem (Pneumatik / Vakuum / Elektrik)
- Zur Nachbearbeitung vorbereiteter Wechseladapter (*)
Steuerungsunabhängigkeit
Steuerungs-
unabhängigkeit
- Der gesamte Automatisierungsprozess kann auf nur einer Steuerungsplattform realisiert werden:
Die gleiche Programmierumgebung für Roboter und alle anderen Maschinenkomponenten - Keine spezialisierten Roboter-Programmierer
- Keine Schnittstellen-Probleme zwischen
verschiedenen Steuerungen - Einheitliche Hardware in der gesamten Maschine (Motoren, Umrichter, …)
- Verringerte Lagerhaltungskosten
- Vereinfachter Service
